)
)
Cooperative V Lock Handling EOAT Solutions
V-LOCK SYSTEM AND COOPERATIVE ROBOTS
In the area concerning the automation of the assembly, Metal Work has developed different applications with some producers of cooperative robots, which is robots of the very latest generation, designed to interact with humans in total security. This type of robots perfectly integrates with the handling products of the V-Lock series, marked by the fact that they can be very easily assembled, disassembled and reconfigured.
Indeed, it is a complete system for the manipulation, whose components are equipped with a standardised dovetail interface, which makes the assemblage easier, in order to build and reconfigure kinematic chains in a fast and simple way. Each component is connected to the previous one and/or to the next one through brackets type V that adhere to the dovetail of the same component; the closing of the brackets occurs through the clamping of two easily accessible lateral screws, using a very common Allen wrench.
It is therefore intuitive how a system equipped with components so easy to manually assemble and reconfigure such as V-Lock, allows to make the most of the potential of a cooperative robot, able to interact with the human being, thereby enabling the operator to change diverse collets sets, rotary and linear actuators in a fast and simple way. Moreover, through the utilisation of universal adapters called V-Lock Transformers, it is possible to add to group components coming from other producers, such as suction cup gripping systems.
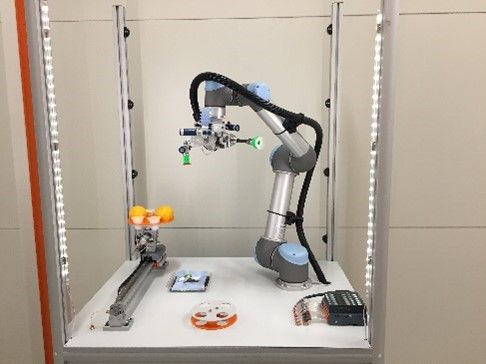
V-Lock system used together with a cooperative robot
Among the applications developed so far, there is a recent and very interesting one, concerning the assembly of components for industrial automation.
In this case, a two-arm Cartesian robot type SCARA carries out the assembly of two different components. Each component is picked from a storehouse of departure, by means of P4K collets of the V-Lock series, together with a mechanical compensator of V-Lock precision, which is able to recover eventual mismatches with the stands. The assemblage occurs in a central station and the whole is then deposited in a station of final release, ready for the following phases of assemblage and testing.
What especially characterises this application is the fact that the two arms, besides, of course, being synchronised, can interact with humans (both operators and manteinance workers) without constituting a source of danger. Indeed, the robot, which shows a casing in impact resistant technopolymer, is equipped with sensors that immediately block it in case of collision.
The speeds are voluntarily reduced and the cycle time is minimised thanks to the optimisation of the motion trajectories.
Â